Eine Menge von Zahlen x wird genau einer Menge an Zahlen y bzw. f(x) zugeordnet. Mit der Funktionsgleichung ist festgelegt, welcher Zahl jeweils zugeordnet wird.
Was ist eine Ableitung?
Die Ableitung einer Funktion gibt fÞr jede Stelle x die Steigung des Graphen an der Stelle an.
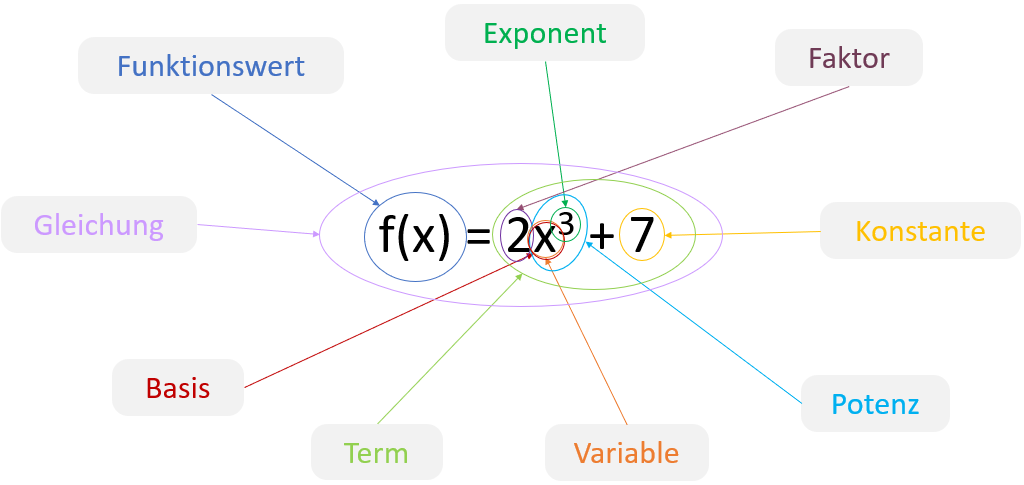
Vokabeln einer Gleichung
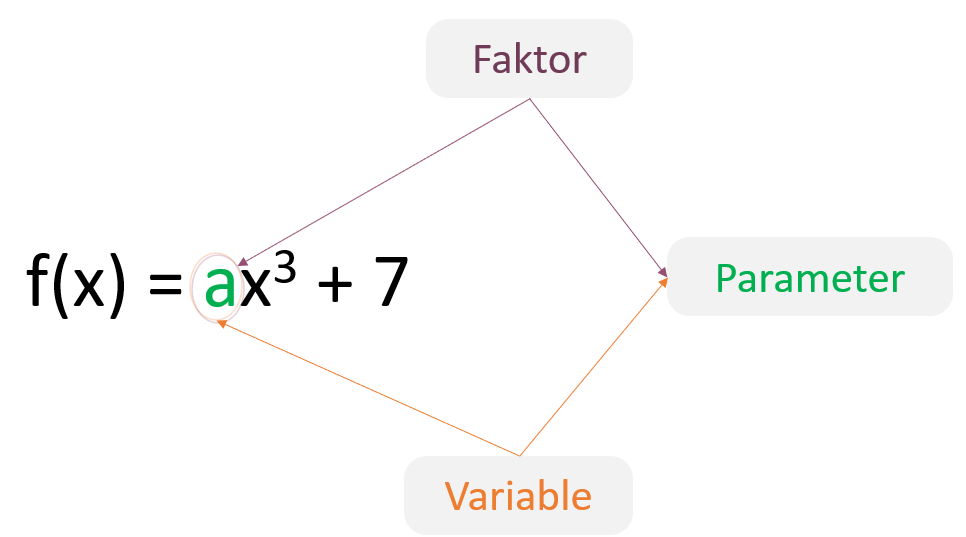
Parameter
Ein Parameter ist ein variabler Faktor. D.h. er kann verschiedene Zahlenwerte annehmen.
Punkt vs. Stelle
Ein Punkt hat immer x- und y-Koordinaten: P(x|y).
Eine Stelle nur x: Z.B. Nullstelle bei x = 3.
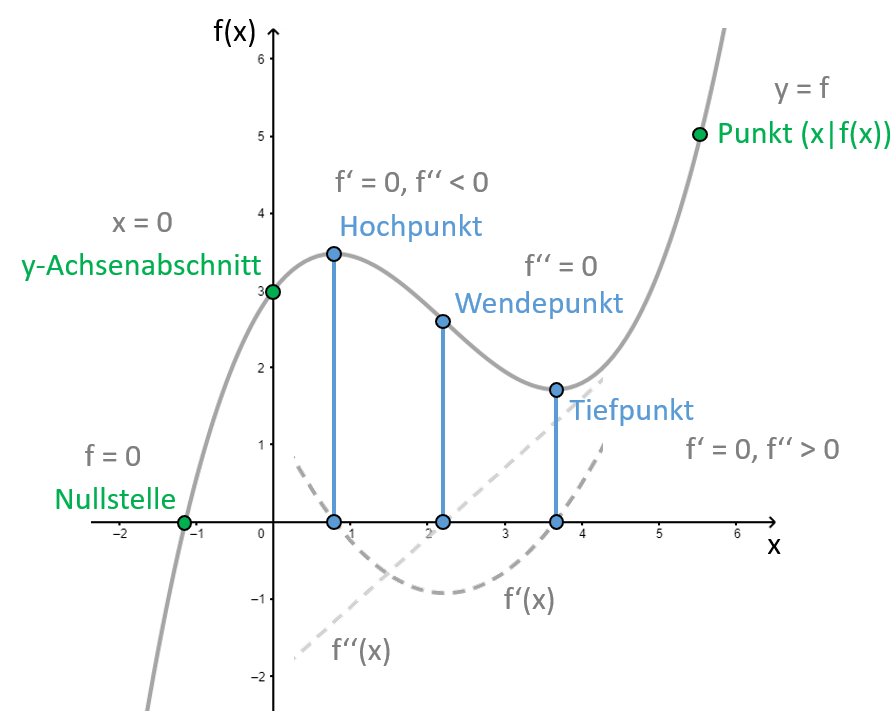
Eigenschaften eines Graphen
Besondere Punkte und Stellen
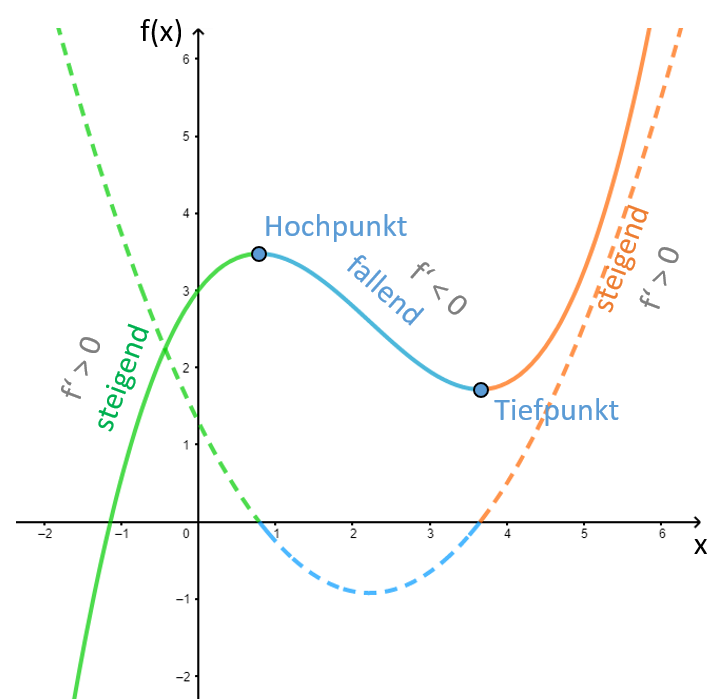
Monotonie
In welchen Abschnitten steigt oder fÃĪllt der Graph?
Zu erkennen an der ersten Ableitung.
(Abschnitte immer von Extremstelle zu Extremstelle.)
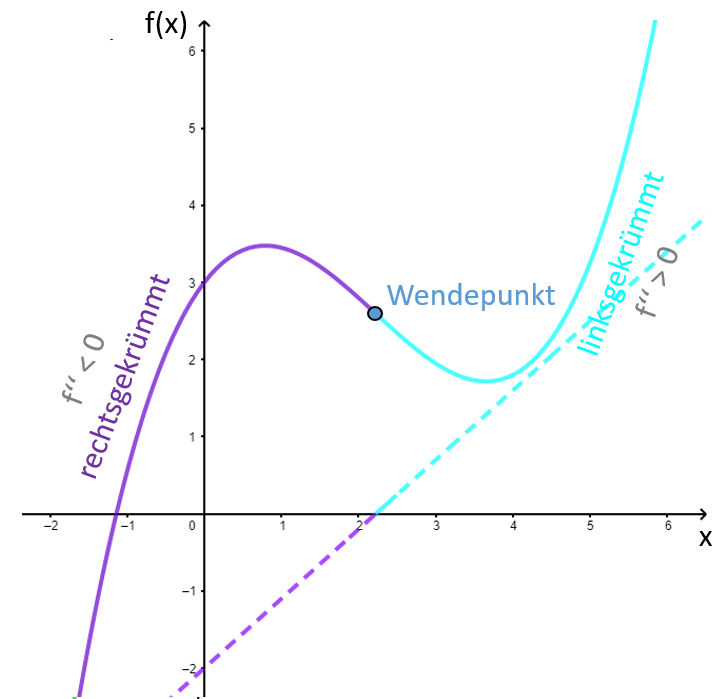
KrÞmmung
In welchen Abschnitten ist er rechts- und in welchen linksgekrÞmmt?
Zu erkennen an der zweiten Ableitung.
(Vorstellung: Mit dem Auto in positiver x-Richtung fahren: Kurven rechts oder links?)
Aufgabe
f(x) = -0,5x2 + 2x + 4
a) Skizziere den Graphen.
b) Markiere und beschrifte markante Punkte. (HP, TP, WP, NS, y-A.)
c) Bestimme die Punkte mit dem GTR.
d) PrÞfe mit dem GTR, ob der Punkt (1|5) auf dem Graphen liegt.
e) Markiere und beschrifte Monotonie und KrÞmmungen.
LÃķsung
Nullstellen und y-Achsenabschnitt
Nullstelle berechnen
("Berechne" = per Hand)
Berechne die Nullstellen von f(x) = xÂē â 9.
Ansatz: f(x) = 0
xÂē â 9 = 0 |+9
xÂē = 9 |Wurzel
x = 3 oder x = -3
Funktion mit Parameter: f(x) = axÂē + 4x - 2,5
FÞr welchen Wert von a hat die Funktion eine Nullstelle bei x = 9?
Potenzregel: \(f(x) = x^5\) fâ(x) = 5âx4
f(x) = xa fâ(x) = aâxa â 1
âExponenten kommen als Faktor davor und werden oben um 1 verringert.â
Berechne den Tiefpunkt von f(x) = 2x^3 + 2x â 4.
Ansatz: f'(x) = 0
Ableitung bilden: f'(x) =
LGS lÃķsen
Vorgehen beim LÃķsen
Beispiel: Wurfparabel ermitteln
Messung des Wurfes
Der Abwurfpunkt ist 0,7 m hinterm Ursprung (FÞÃe) und in einer HÃķhe von 1,2 m: A(0,7|1,2)
Der hÃķchste Punkte wird nach 2,0 m erreicht und hat eine HÃķhe von 2,5 m: H(2,0|2,5)
Funktionsgleichung fÞr den Wurf aufstellen
Grad einer Wurfparabel: 2.
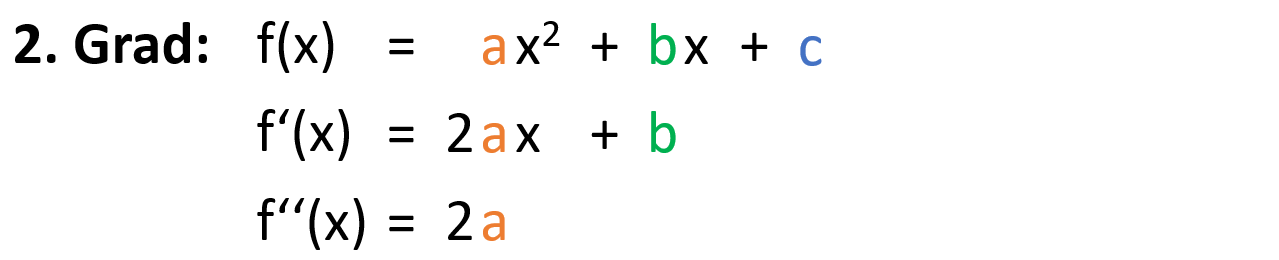
Allgemeine Funktion 2. Grades: f(x) = axÂē + bx + c
Ihre Ableitung: f'(x) = 2ax + b
Bedingungen an die Funktion:
f(0,7) = 1,2 (Abwurfpunkt)
f(2,0) = 2,5 (Hochpunkt)
f'(2,0) = 0 (Hochpunkt)
Gleichungssystem durch Einsetzen der Bedingungen:
aâ0,49 + bâ0,7 + c = 1,2
aâ4,0 + bâ2,0 + c = 2,5
2aâ2,0 + b = 0
GTR:rref -> a = -0,77; b = 3,08; c = -0,58
Einsetzen der Werte fÞr die Parameter:
Die Wurfparabel hat die Funktionsgleichung
f(x) = -0,77xÂē + 3,08x - 0,58
Allgemeine Funktionsgleichungen
Eigenschaften und ihre Bedingungen
Eigenschaft
Bedingung(en)
hat an der Stelle x = 3 den Wert -1
f(3) = -1
verlÃĪuft durch den Punkt P(1|2)
f(1) = 2
verlÃĪuft durch den Ursprung
f(0) = 0
Nullstelle bei x = 5
f(5) = 0
schneidet die y-Achse bei â2
f(0) = -2
Extremstelle bei x = 4
f'(4) = 0
Extrempunkt (HP/TP) bei A(4|7)
f(4) = 7; f'(4) = 0
Wendepunkt an der Stelle x = 2
f''(2) = 0
Wendepunkt bei W(2|4)
f(2) = 4; f''(2) = 0
die Steigung an der Stelle x = 8 betrÃĪgt 5
f'(8) = 5
hat in (5|1) eine waagerechte Tangente
f(5) = 1; f'(5) = 0
hat bei x = 0 einen Winkel von 45°
f'(0) = 1
Symmetrien
Bei symmetrischen Graphen fallen einige Parameter weg. So kann eine punktsymmetrische Funktion keine geraden Exponenten haben und eine achsensymmetrische keine ungeraden. Die dazugehÃķrigen Parameter mÞssen also nicht bestimmt werden.
Allgemeines Vorgehen
(0. Schritt:)
Wie viele Bedingungen sind nÃķtig? (Grad der Funktion + 1)
1. Schritt:
Bedingungen (f(x) = y) anhand von Eigenschaften notieren.
2. Schritt:
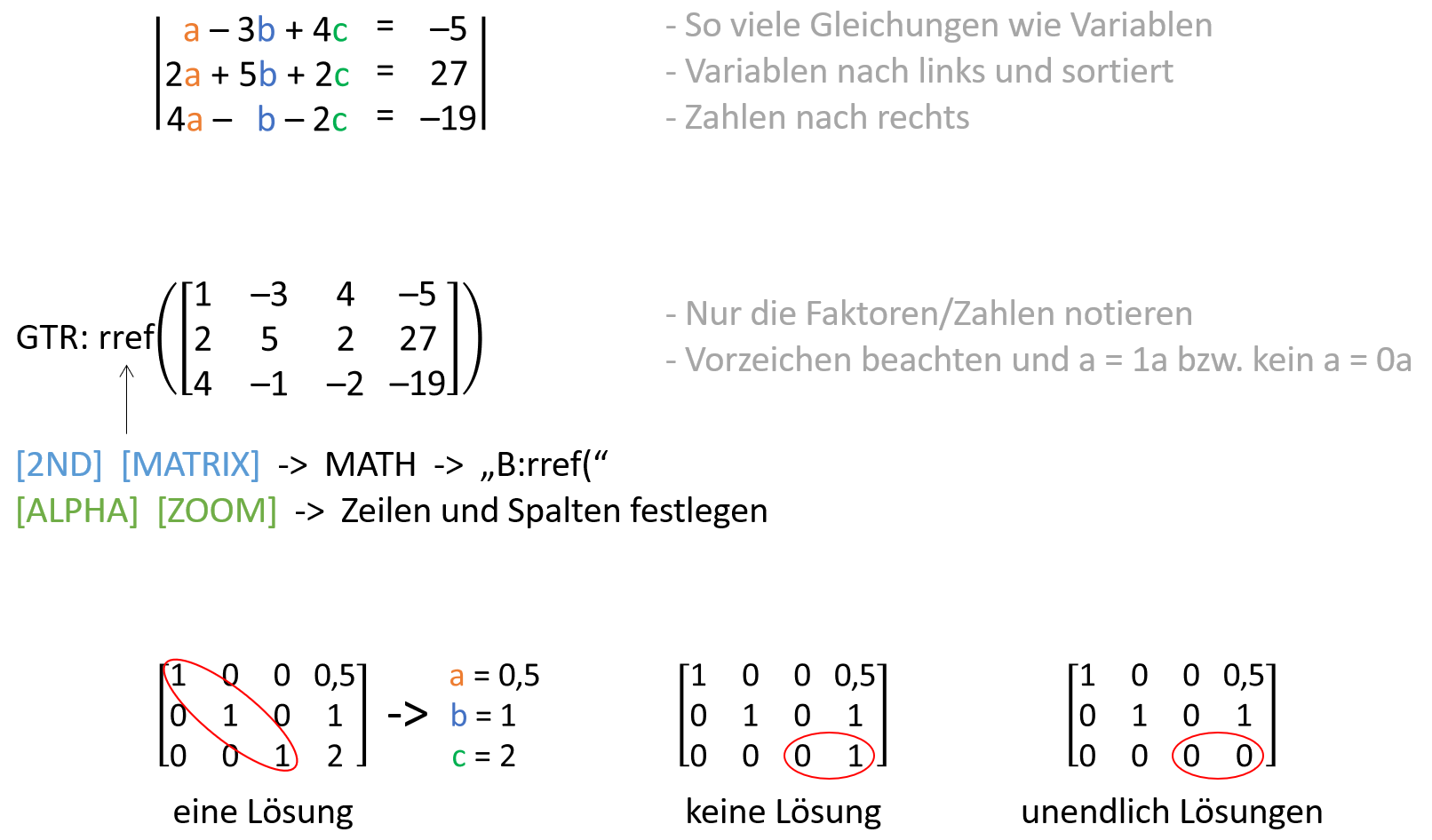
Gleichungen aus den Bedingungen aufstellen. DafÞr in die allgemeinen Funktionsgleichungen einsetzen.
3. Schritt:
Das LGS mit dem GTR (rref) lÃķsen, um die Parameter zu erhalten.
4. Schritt:
Funktion mit den Parameter-Werten notieren.
Beispiel
Aufgabe: Der Graph einer ganzrationalen Funktion dritten Grades hat einen Tiefpunkt bei T(3|3) und einen Wendepunkt bei W(1|1). Ermittle die dazugehÃķrige Funktionsgleichung.
(0. Schritt: Anzahl Bedingungen)
Es werden 4 Bedingungen benÃķtigt.
Zwei LandstraÃen sollen neu miteinander verbunden werden. Die westliche StraÃe entspricht der Funktion f(x) = âx2 + 4 und die Ãķstliche entspricht g(x) = 1.
a) Bestimme eine Funktion h(x) dritten Grades, die beide StraÃen mÃķglichst sinnvoll miteinander verbindet.
b) Stell dir vor, du fÃĪhrst diese StraÃe entlangâĶ welches Problem kÃķnnte an den Ãbergangsstellen der StraÃen entstehen?
LÃķsung
a) Bedingungen: h(1)=3, h'(1)=-2, h(3)=1, h'(3)=0
Allgemeine Gleichung ... Gleichungssystem ... Matrix im GTR mit rref ... LÃķsungen: a=0, b=0,5, c=-3, d=5,5 h(x) = 0,5x2 - 3x + 5,5
b) An der ersten Ãbergangsstelle ÃĪndert es sich schnell von einer Rechts- in eine Linkskurve. Man mÞsste dann das Lenkrad ruckartig zur anderen Seite drehen. Diesen Ruck kann man entfernen, indem dort auch die zweiten Ableitungen Þbereinstimmen. Diese beschreiben schlieÃlich, wie sich die ersten Ableitungen verÃĪndern. Wenn sie dort gleich sind, spricht man von "ruckfrei".
Mit zusÃĪtzlich h''(1)=-2 und h''(3)=0 folgt: h(x) = 0,125x5 - 1,5x4 + 6,75x3 - 13,5x2 + 10,125x + 1
sprungfrei f(x)=g(x)
knickfrei f(x)=g(x) f'(x)=g'(x)
ruckfrei f(x)=g(x) f'(x)=g'(x) f''(x)=g''(x)
Die Graphen treffen sich nicht.
Die Graphen treffen sich.
Die Graphen treffen sich ohne Knick.
Die Graphen treffen sich ohne Knick und mit einem sanften Ãbergang.
Klausurthemen
Vokabeln
Vokabeln kennen und Frage ausfÞhrlich beantworten kÃķnnen: Was ist ein Parameter?
Funktionen mit Parameter
Nullstellen, y-Achsenabschnitt, Extrema (Hoch-/Tief-), Wendepunkte, Steigung (Ableitung)
→ Sowohl berechnen als auch daraus Parameter-Wert bestimmen (Parametervariation)
Monotonie und KrÞmmung erkennen
Graphen skizzieren und davon ablesen
Gleichungssysteme
Mit bekanntem Vorgehen und dem GTR lÃķsen
SonderfÃĪlle âkeine LÃķsungâ und âunendlich LÃķsungenâ erkennen
Ãbungsaufgaben
Aufgabe 1: Parameter
Beschreibe, was ein Parameter ist und gib ein Beispiel an.
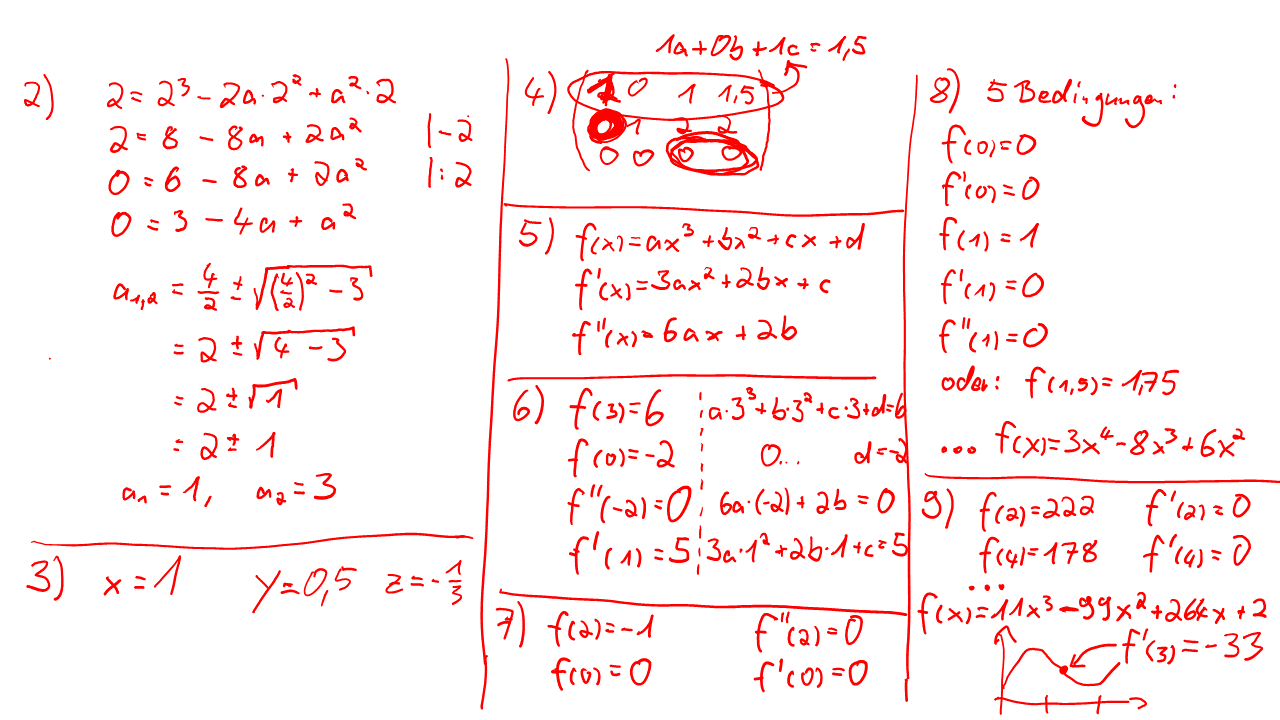
Aufgabe 2: Funktion mit Parameter
Die Funktion f(x) = x3 - 2ax2 + a2x soll den Punkt P(2|2) enhalten. Bestimme den Wert des Parameters a dafÞr.
Aufgabe 3: Gleichungssysteme
LÃķse das lineare Gleichungssystem mit dem GTR und notiere die LÃķsungen.
Aufgabe 4: Besondere LÃķsungen
Notiere beispielhaft, was der GTR beim LÃķsen eines Systems von drei Gleichungen mit unendlich vielen LÃķsungen anzeigen kÃķnnte.
Aufgabe 5: Allgemeine Funktionen
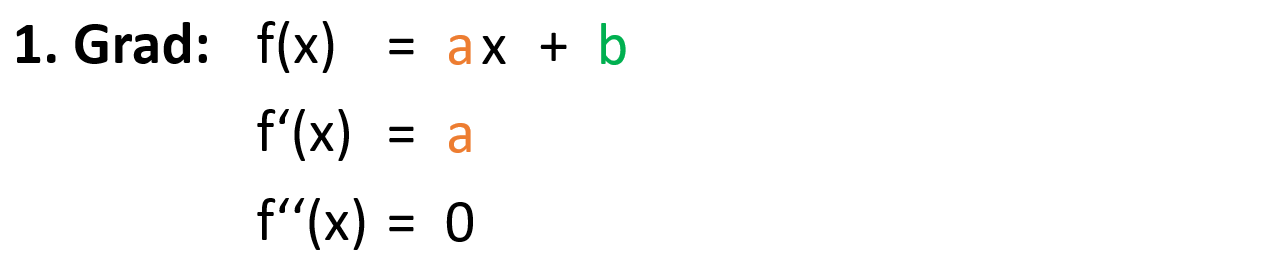
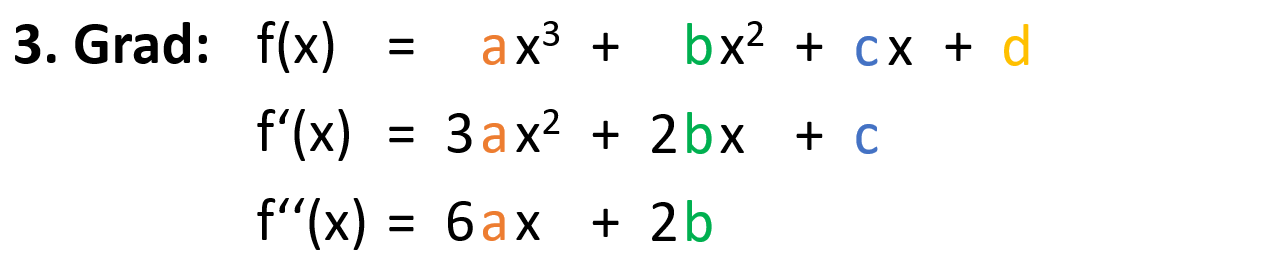
Notiere die allgemeinen Funktionsterme einer ganzrationalen Funktion dritten Grades und ihrer ersten und zweiten Ableitung.
Aufgabe 6: Eigenschaften und Bedingungen
Eine Funktion dritten Grades soll bestimmte Eigenschaften haben. Stelle jeweils zu den genannten Eigenschaften die Bedingungen auf und notiere die dazugehÃķrige Gleichung.
verlÃĪuft durch den Punkt P(3|6)
schneidet die y-Achse bei â2
hat eine Wendestelle bei x = â2
steigt bei x = 1 um 5 an
Aufgabe 7: Mehrere Bedingungen
Notiere alle Bedingungen, die sich aus den folgenden Eigenschaften entnehmen lassen:
âDer Graph der Funktion hat im Punkt (2|â1) einen Wendepunkt und im Ursprung eine waagerechte Tangente.â
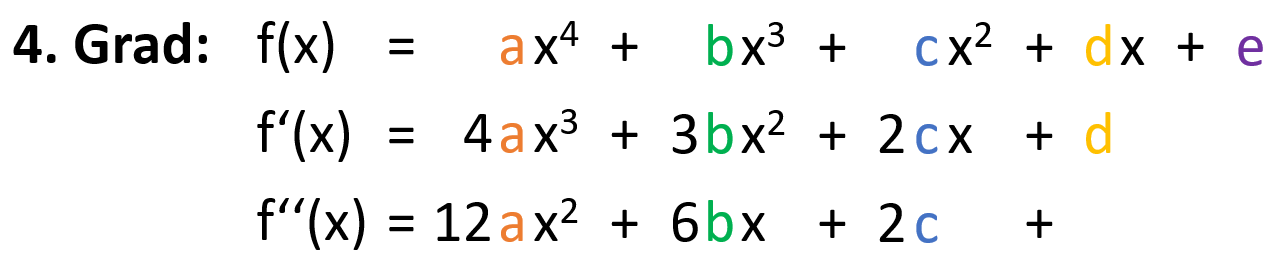
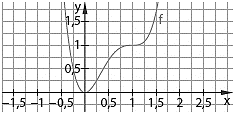
Aufgabe 8: Graph zu Funktion
Bestimme die Gleichung der Funktion vierten Grades mit folgendem Graphen:
Aufgabe 9: Textaufgabe
Das HÃķhenprofil einer 6 km langen Wanderstrecke lÃĪsst sich durch eine ganzrationale Funktion dritten Grades beschreiben (Einheiten: x-Achse 1km, y-Achse 100m). Nach 2 km geht es auf einer Strecke von 2km nur noch bergab und ausgehend von einer HÃķhe von 222m wird dabei ein HÃķhenunterschied von 44m Þberwunden. AnschlieÃend fÞhrt die Tour wieder bergauf.
Skizziere die Wanderstrecke als Graph und stelle die Gleichung der Funktion auf. Ermittle dann den Punkt, an dem das GefÃĪlle am grÃķÃten ist.